








目前,“驴子”(Donkey)是以色列通用机器人有限公司正在研发的一款无人驾驶地面车辆,预计在2017年中期完成研制。其合同商为通用机器人有限公司。

“驴子”原型样机
“驴子”是一款轻量级4×4多用途可折叠机器人平台,用于在战场进行快速部署。通用机器人有限公司宣称该装备可以像担架一样展开,且可在30秒内进行部署。“驴子”可以携带超过70千克的重量,行驶速度可达到16千米/小时。其每一个车轮都有电动静音传动装置,内嵌有指定的噪声强度。该装备由坚固的手持式松下“游侠”触摸板操作控制装置进行操控。其用户界面配置可以为显示器提供摄像机的实时视频/图像,以及一系列驱动能力,包括:航路点导航和跟随领导者。按照预期,“驴子”将被用于许多应用领域,包括:清道、简易爆炸装置的检测与中和,以及后勤和远程监测。
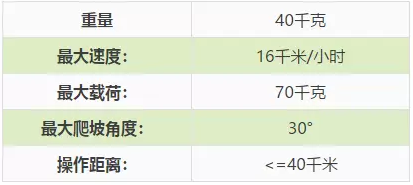
“驴子”规格
截至2016年,原型样机。
Sera Ingénierie公司研发的基础款“Robbox”多用途战术机器人(Multi-purpose Tactical Robot,MTR)可用于多种任务,例如:观察、巡逻和后勤保障。该公司正在与奈克斯特(Nexter)机器人公司合作,进一步将“Robbox”研发为后勤保障车辆,即“骡子”(Mule),后者也将拥有一个武装变型车。Sera Ingénierie公司负责“Robbox”底座,而奈克斯特公司则提供机器人智能。该装备由支持双重创新保障制度(régime d'appui à l'innovation duale,RAPID)计划的法国武器装备总署(direction générale de l'armement,DGA)提供资金保障。其合同商为位于维勒邦伊夫特河畔的Sera Ingénierie公司和位于凡尔赛的奈克斯特机器人公司。

奈克斯特公司的“骡子”装配“Robbox”底盘
“Robbox”的4X4驱动底盘由两个独立的单独驱动前后轮组成,以及一个中央连接机箱来支撑传感器或载重。这种高速与前后双车轴转向的结合,在开放的城市环境中提供了极好的机动性。
“Robbox”可以由电池、柴油或混合系统驱动,且可以在战场上为电池充电。两个车载动力组提升了“Robbox”的整体性能,并在混合配置下运行时,在长距离中保持低噪音。该动力模块在配置改变维修时可以被轻松替换。
奈克斯特公司的“骡子”被设计用于后勤和运输。该装备可以利用航路点或道路记录与重放导航进行半自主运行,自动扫描区域、自主领会任务、自动返回原始位置或进行人员跟随。激光扫描仪提供车载障碍物的检测与规避,让其拥有安全的自主能力。
“骡子”无人驾驶地面车辆可以用顶部和底部车厢来携带货物。其顶部和底部各自可承载的最大重量为300千克。根据设计,该装备可以装载多种货物,包括:食物、弹药、水、燃油和电池等。它能够支援和再补给一个或多个班或排(多达10名士兵)。
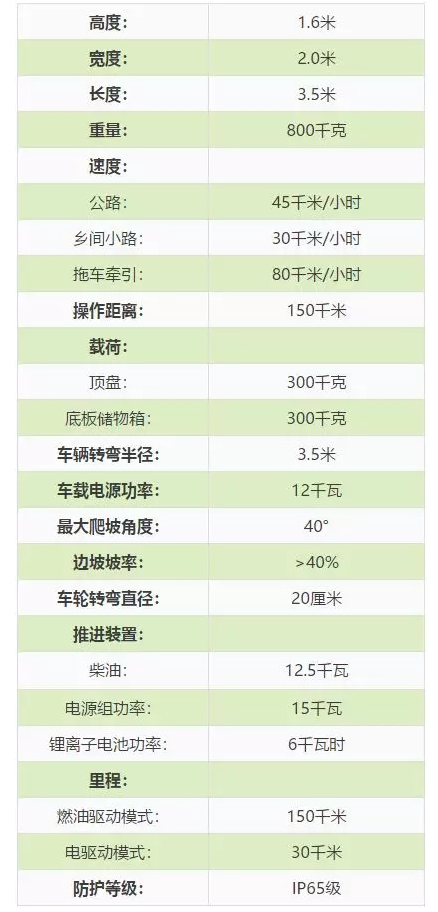
“Robbox”/“骡子”规格
“骡子”装配了6台摄像机来提供态势感知,并配备了全球定位系统、照明设备和麦克风。“Robbox”的底盘可以装配红外捕捉器(与欧洲导弹集团合作)。该装备可通过两个人机界面(human machine interfaces,HMI)操控,车载人机界面(加固计算机)或手持人机界面(平板电脑和智能手机)均可。其显示器经过设置可以同时显示4台摄像机的画面。
截至2017年,已研发完成且准备生产。
具有关节机械腿的柔性四足机器人“StarlETH”由苏黎世联邦理工学院(又名瑞士联邦理工学院)的自主系统实验室研发。目前,“StarlETH”已被用于进行运动研究,但是,一旦完成研发,可用于检查工业环境、炸弹处理、搜索与救援(Search and Rescue,SAR)任务和排雷。其合同商为苏黎世联邦理工学院机器人系统实验室。
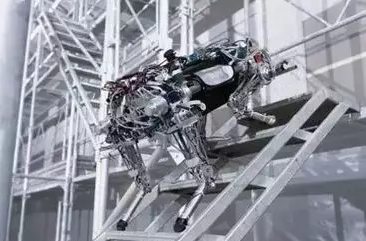
“StarlETH”展示其攀爬能力
“StarlETH”是具有12个自由度的四足驱动平台(每条机械腿共有3个自由度),由串联弹性制动器驱动。各个自由度用于髋关节外展/内收,髋关节的屈曲/伸展以及膝关节屈曲/伸展。其机械腿的设计(集成弹簧)模仿了肌肉如何储存和释放能量。执行器使系统转矩可控,也适用于进行高度复杂的动态机动动作。在最新版本中,“StarlETH”机器人可以通过车载能源供应和计算,能够执行动态行走和小跑等动作。它的大小相当于一条狗,重量为25千克。“StarlETH”的主体由碳纤维夹层硬壳构建,以及铝制的前后连接器。其所有电子部件都通过主动式空气环流进行冷却。
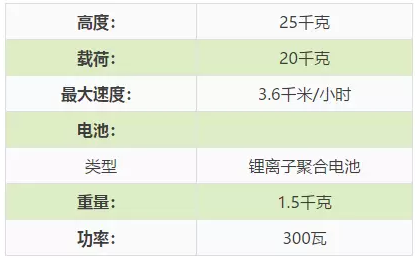
“StarlETH”规格
“StarlETH”使用电动机驱动,经测试其越障跑的速度大约为2.52千米/小时。该装备由重量为1.5千克的锂离子聚合电池供电。它装配了将近50个传感器,既可以自主运行也可以进行遥控。其最大速度可以达到3.6千米/小时。“StarlETH”装配了战术脚传感器,以及车载惯性测量装置、三台电脑、激光传感器和照相机(都用于感知周边环境)。
截至2017年,原型样机。其研究仍在进行中。












 602030锂电池300毫安3.7...
602030锂电池300毫安3.7... 
















 京公网安备 11011202001879号
京公网安备 11011202001879号